
Hierarchical Integration of UAS and Sentinel-2 Imagery for Spruce Bark Beetle Grey-Attack Detection by Vegetation Index Thresholding Approach
1
Institute of Electronics and Computer Science, 14 Dzerbenes St., LV-1006 Riga, Latvia
2
Institute of Land Management and Geodesy, Latvia University of Life Sciences and Technologies, LV-3001 Jelgava, Latvia
3
Latvian State Forest Research Institute “Silava”, Rigas St., 111, LV-2169 Salaspils, Latvia
*
Author to whom correspondence should be addressed.
Forests 2024, 15(4), 644; https://doi.org/10.3390/f15040644
Submission received: 23 February 2024
/
Revised: 17 March 2024
/
Accepted: 29 March 2024
/
Published: 2 April 2024
(This article belongs to the Special Issue Forest Structure Monitoring Based on Remote Sensing)
Abstract
:This study aimed to examine the efficiency of the vegetation index (VI) thresholding approach for mapping deadwood caused by spruce bark beetle outbreak. For this, the study used upscaling from individual dead spruce detection by unmanned aerial (UAS) imagery as reference data for continuous spruce deadwood mapping at a stand/landscape level by VI thresholding binary masks calculated from satellite Sentinel-2 imagery. The study found that the Normalized Difference Vegetation Index (NDVI) was most effective for distinguishing dead spruce from healthy trees, with an accuracy of 97% using UAS imagery. The study results showed that the NDVI minimises cloud and dominant tree shadows and illumination differences during UAS imagery acquisition, keeping the NDVI relatively stable over sunny and cloudy weather conditions. Like the UAS case, the NDVI calculated from Sentinel-2 (S2) imagery was the most reliable index for spruce deadwood cover mapping using a binary threshold mask at a landscape scale. Based on accuracy assessment, the summer leaf-on period (June–July) was found to be the most appropriate for spruce deadwood mapping by S2 imagery with an accuracy of 85% and a deadwood detection rate of 83% in dense, close-canopy mixed conifer forests. The study found that the spruce deadwood was successfully classified by S2 imagery when the spatial extent of the isolated dead tree cluster allocated at least 5–7 Sentinel-2 pixels.
1. Introduction
The European spruce bark beetle (Ips typographus) is recognised as one of the most dangerous pests in Europe and the most destructive pest in Latvia [1,2], causing permanent damage to trees. It can infest weakened spruce and unpeeled timber and threaten completely healthy trees, causing significant environmental and financial losses. The early detection of the infestation can prevent wide-spread effects similar to a forest fire [3].
Spruce is a common tree in the landscape of Latvia, and is the third most common tree species; spruce forests occupy about 19% of all forests. Only one species of spruce grows in Latvia: Norway spruce (Picea abies), which grows mainly in mixed forests [4]. The activity of spruce bark beetles begins in the spring when the air temperature has reached about +15 degrees Celsius. The hibernating beetles, which have been sleeping in the ground cover, come out and look for a tree to develop. The first to emerge are the male bark beetles, who run into the trees, create a mating room by digging holes in the trees and invite female bark beetles by releasing a particular pheromone, eventually laying eggs in the trees. The development of the bark beetle from eggs to larvae and further to pupae, from which young beetles hatch, takes an average of 60–70 days. After that, the young bark beetles fly out of the already-eaten spruce and look for other development places to form the second generation (observed in the second half of July) [5]. It is a cyclical process that lasts from April until October. The distribution and development of bark beetles are directly influenced by water and nutrient cycles, temperature, and weather conditions [6].
While the bark beetles are making holes in the trunk, the trees are still green (green attack stage). In the second stage, when the young beetles develop under the bark, the needles change their colour from green to yellow-red (red attack) due to the disintegration of chlorophyll. Finally, when the bark beetles have left, the tree withers and the bark and needles fall off (grey attack). The forest’s economic value is lost, and only firewood can be obtained from it [7]. In the first and second stages of development, cutting down trees promptly to mechanically remove the beetles from the forest to the timber processing areas is recommended. In contrast, in the third stage, the tree itself no longer poses a sanitary risk because the bark beetles are no longer in it [8]. At the same time, from April to September, maintenance felling and sanitary random felling should not be carried out in spruce stands older than fifty years because the smell of felling residues attracts bark beetles [9]. On the other hand, flying bark beetles can be caught in the summer by placing pheromone traps in the fresh conifers. The dormant period of the bark beetle from October to March is the right time to survey stands and assess their condition [10].
To effectively reduce the impact of the bark beetle and prevent an outbreak, it is essential to recognise infested trees during the green attack period and remove the tree whilst the larvae are still contained [11]. However, due to the current high outbreak levels, monitoring large areas effectively and promptly is difficult [8]. In the last three years, the population of bark beetles has increased rapidly in Latvia; consequently, the damage has increased tenfold in three years [12]. From 1 April to 31 October 2023, Latvia’s State Forests (LVM) reported a forest area of 5128 ha, where fresh damage by spruce bark beetle had been detected [13]. This damaged area covered about 0.93% of all spruce forests in Latvia. The lack of data on forest-damaged areas and pest spatial spread patterns combined with the limited use of field measurements leads to difficulties in the control, planning and management of attacked forests [14]. Thus, mapping existing forest damage (grey attack) or deadwood cover by the spruce bark beetle is urgent, along with detecting early-stage infestations. The successful results could provide a quantitative and qualitative assessment of the affected forest structure, its dynamics of changes, and the planning of logging operations to eliminate and prevent the cumulative effects of the bark beetle invasion [15]. Therefore, this study aims to find a fast and straightforward damaged forest mapping approach for the national forest industry to help plan logging operations to eliminate and prevent the cumulative effects of the bark beetle invasion at a stand/landscape level. This study is focused on spruce tree mortality mapping rather than bark beetle early-stage infestation detection.
While field observations of infested and damaged trees are costly, laborious and ineffective over large areas, remote sensing (RS) has proven its applicability for pest infestation at different detection stages with high accuracy and efficiency [16,17,18]. The efficiency of RS depends mainly upon the spatial resolution of the sensor (pixel size or pts/m2), the range of the electromagnetic spectrum (spectral resolution), the sensitivity of the sensor’s detector to detect electromagnetic radiation (EM) (radiometric resolution), revisit time (temporal resolution) and whether the sensor is passive (detect external EM, e.g., optical sensors) or active (emit their own energy) [19]. Remote sensors are carried by three major platform groups: satellite (spaceborne) characterised by the highest land cover rate; airborne, as a primary source for accurate RS data on a state level; and recently, UAS (Unmanned Aerial Systems) platforms, providing the most accurate data and cheapest solutions but with the least spatial coverage. With the rapid elaboration of multiple modern RS systems and new algorithms such as machine and deep learning modelling, RS operations have reached a state-of-the-art status in their application to forestry [20,21].
RS-based methods for detecting bark beetle attack stages are associated with various segmentation algorithms that allow the separation/classification of infested trees/canopies. The Vegetation Index (VI) thresholding-based method applied to various imagery is simple and easily applied [22]. VI is a mathematically calculated combination of reflectances from multiple sensors’ spectral bands into a single pixel value (one band), which can be used for a unique spectral signature creation for the object of interest (e.g., deadwood tree). Considering the strong absorption by chlorophyll in the red (visible light) spectrum in contrast with high reflectance in the near-infrared spectrum, indices like the Normalized Difference Vegetation Index (NDVI) are widely used for tree/canopy defoliation detection [23]. The object of interest (e.g., deadwood cover) can be segmented based on the threshold related to the corresponding object’s spectral reflectance signature. However, using a standardised threshold-based approach is limited due to seasonal vegetation changes, atmospheric effects, and the differences in sun-to-sensor and sensor-to-target geometry across geographical locations [23].
With available accurate and sufficient handcrafted reference/training data, classical machine learning (ML) algorithms like random forest (RF) and support vector machines (SVM) allow for quicker imagery classification [24]. ML uses algorithms that analyse data, learn from it, and then employ the knowledge gained to propose intelligent solutions. The need for analysing massive amounts of RS data then led to the development of deep learning (DL), based on a hierarchy of concepts [25]. In contrast to ML, DL algorithms, like convolutional neural networks (CNNs), use the raw input RS data as a training set to perform advanced (deep) self-learning, and require high-performance computer power [26,27]. Multispectral (MS) and hyperspectral (HS) data and advances in ML algorithms have significantly improved the detection of bark beetle attack stages using either single RS imagery data, time series, or RS data integration. The overall accuracies of classification infestation stages in previous studies varied between 70% (green attack) and 90% (deadwood) for classical methods (RF, SVM, etc.) using MS analysis, mostly from LandSAT-8 and Sentinel-2 [18]. Understanding the physiological and biochemical characteristics of infested trees with respect to specific spectral information is critical to successfully applying VI-based ML and DL algorithms [28]. Detailed comparisons of the accuracy and effectiveness of current methods for detecting spruce bark beetle have been undertaken [18,29], and the MS efficiency of UAV/UAS imagery [8,30,31] and the MS efficiency of Sentinel-2 imagery [32,33], including a review of the factors influencing the accuracy of the detection of infestations [28] and current challenges of RS in forestry [20].
To accurately identify and map damaged forests, spatially accurate reference data is needed to calibrate and validate the developed models. However, the ‘in situ’ field measurements are costly and time-consuming. These practical limitations may be replaced using UAS imagery, which can be obtained and processed much faster over relatively large areas than direct field measurements [34,35]. The study by Abdollahnejad et al. [14] used UAS imagery as a reference data source to conduct a systematic forest health assessment caused by spruce bark beetle using WorldView-2, Pléiades 1B, and SPOT-6 satellite imagery. The most recent study by Schiefer, et al. [36] successfully used UAS-based reference data for deadwood fractional cover mapping from Sentinel-2, applying DL algorithms.
This study concentrated on two spatial extents related to spruce bark beetle deadwood mapping: a high spatial tree-scale by UAS-based imagery and a landscape/stand-scale with Sentinel-2 imagery. Whereby using UAS-based imagery compensates for the lack of accurate reference data and provides a better understanding of the spatial, multispectral, and temporal comparability relationships between individual dead trees and standing deadwood detection by Sentinael-2 imagery. Based on the results of previous studies, we presumed that spectral differences between healthy and dead spruce trees were more noticeable on UAS imagery due to less dependency on neighbouring species, gaps, and canopy background variations (low vegetation and soil) and thus could be used as reference/training data for landscape models. In this context, our research objectives were: (1) to identify the most effective VI by UAS-based imagery for spruce bark beetle dead trees detection; (2) to use a VI threshold-based dead tree mask from UAS as reference data for finding effective Sentinel-2 spectral predictors for optimal deadwood mapping in mixed spruce forests; (3) examine and validate the Sentinel-2 based deadwood mapping VI models; and (4) to find the minimal spatial extent of the isolated dead tree clusters for successful classification by the S2 mask.
2. Materials and Methods
2.1. Study Area
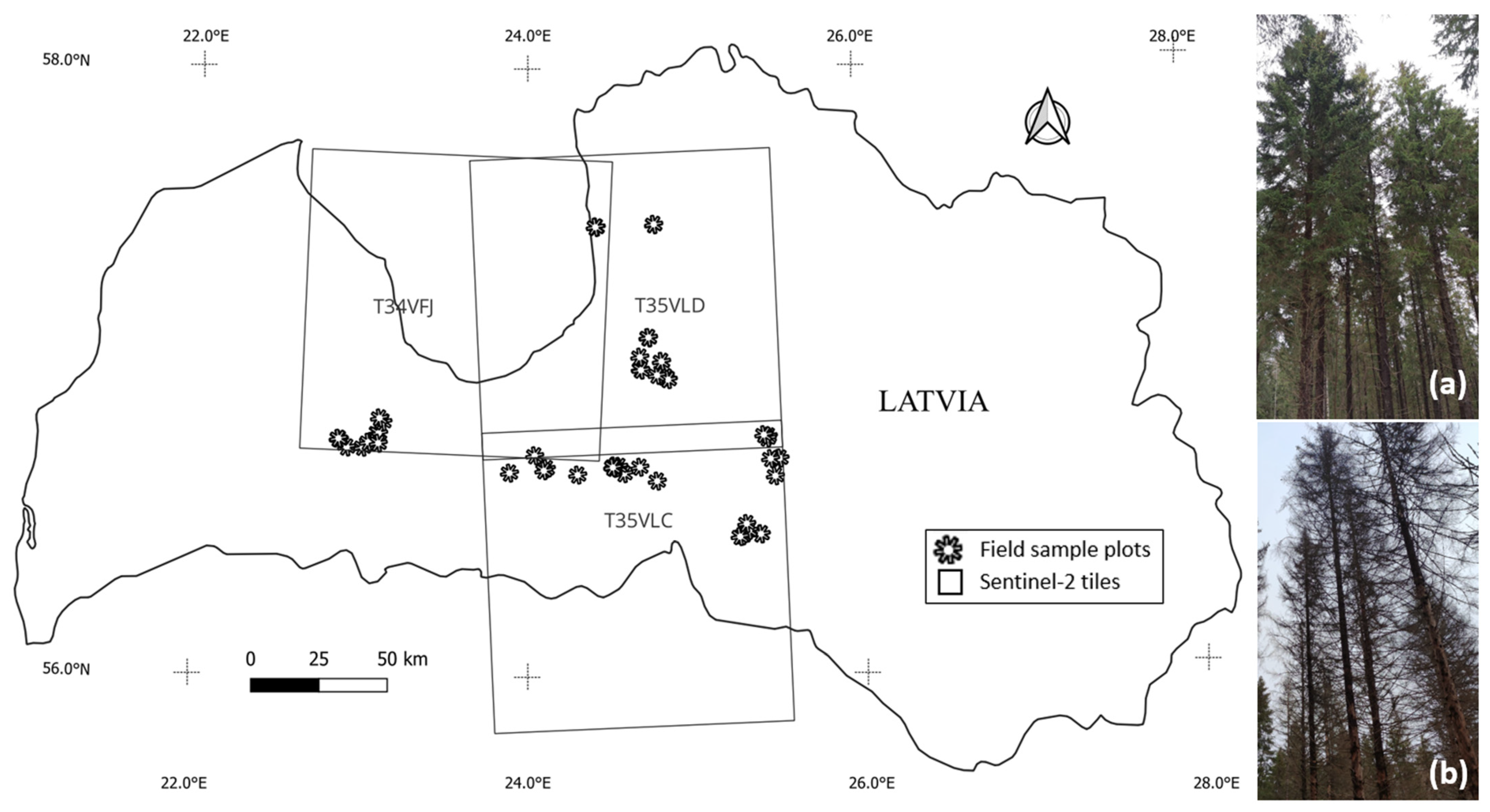
The study area is located in the central part of Latvia, the area most susceptible to the spruce bark beetle attacks in recent years, and covers approximately 15,000 km2. The area represents flat terrain with relief from 0 to 60 m (above sea level), dry mineral and drained peat soils (clay loam and sandy loam), and an annual rainfall of 640–690 mm. Across the study area, sixty-two (62) field inventories were performed during March–June 2023 in forest areas infested by spruce bark beetle (Ips typographus). Each field inventory is represented by 500 m2 circle sample plots and related to mostly mature, dense, close-canopy hemiboreal mix conifer forest with Picea abies (Norway spruce) dominated, Figure 1. All 62 forest sample plots were covered by UAS-acquired MS imagery with a slight delay in May–July 2023. Both field inventory and UAS imagery data were acquired and provided by the Latvian State Forest Research Institute (LSFRI) ‘Silava’.
2.2. Data Overview
2.2.1. Forest Inventory and Sample Plots Data
Initially, forest compartments for sample plot establishment were selected based on forest inventory data provided by the JSC “Latvia’s State Forests”, focusing on stands where insect damage, primarily from the spruce bark beetle, was observed in early 2022 and 2023, calling for sanitation felling. During the inspection of selected sites, areas of damaged trees were identified, their perimeter was marked, and circular 500 m2 plots were established for further measurements of the individual trees. Individual trees were measured within every circular sample plot. Every tree’s diameter at breast height (DBH) was measured with a manual calliper, tree height by a hypsometer, and azimuth by compass, in addition to the distance from the plot centre and crown defoliation condition. Defoliation was expressed as a percentage using 5% intervals. Respectively, 0% defoliation corresponds to a healthy tree with full foliage, whereas 100% defoliation describes a dead tree without foliage (grey attack) [37]. The coordinates of each tree were calculated based on sample plot centre coordinates, magnetic declination, individual tree azimuths and distances from the centre. The geolocations of trees were manually updated using UAS-based orthophoto maps that covered each sample plot.
Finally, 1383 healthy spruce trees and bark beetle-affected spruce trees were selected from all established field sample plots for the study. The chosen spruces mainly belonged to the forest’s emergent and canopy layer and had been identified on the UAS imagery. All selected tree locations (field-based coordinates) were clarified and updated based on a visual comparison using UAS-generated MS orthophotos. The updated coordinates corresponded to the tops of the tree crowns visible on the UAS imagery. For further analysis, the selected 1383 spruce trees were separated into two groups based on defoliation status: 1035 dead trees (90–100% defoliation) and 305 healthy (live) trees (0–10%). Thus, the remaining 43 trees with a defoliation status of 10–90% were excluded from analysis due to an insufficient tree number for additional research on the correlation of various defoliation degrees and corresponding spectral characteristics.
2.2.2. UAS Imagery
All UAS imagery was acquired by the DJI Phantom 4 system, which is equipped with five multispectral 1/2.9-inch CMOS (complementary metal oxide semiconductor) sensors (Blue (B): 450 nm ± 16 nm; Green (G): 560 nm ± 16 nm; Red (R): 650 nm ± 16 nm; Red edge (RE): 730 nm ± 16 nm; Near-infrared (NIR): 840 nm ± 26 nm). All flights (in total ~240 ha) which covered all 62 field plots were performed with the same data acquisition settings: 115–130 m altitude above ground level (AGL), ground sample distance (GSD) 4.5–5 cm/pixel, 85% along-strip and 75% side-strip, and flight pattern East/West or North/South oriented. Thirty (48%) of all flights are carried out in cloudy (overcast) conditions, while the remaining thirty-two (52%) were under sunny weather conditions without calibrating the sensor to the atmospheric conditions during the data acquisition, in the time range 10:00–15:00. The Latvian permanent global positioning base stations network (LatPos) and DJI Phantom 4 multi-frequency high-precision real-time kinematic RTK GNSS were used for the RTK correction method to achieve 1–2 cm position accuracy for the acquired imagery. The entire photogrammetric processing chain was held by Agisoft Metashape Professional (Version 1.8.4, Copyright 2022 Agisoft LLC., St. Petersburg, Russia) photogrammetric software and performed by LSFRI ‘Silava’. The photogrammetric jobs included imagery orientation (direct georeferencing), dense point cloud and corresponding digital surface models (DSMs), fully automatic computations, and final multispectral orthophoto (10 cm GSD) calculations. Despite a raw imagery resolution of 4.5–5 cm/pixel, the 10 cm GSD orthophotos were produced for all field plots as resampling did not impact tree detection, allowing faster postprocessing and allocating more computer space.
2.2.3. Sentinel-2 Satellite Imagery
To cover all field sample plots, the Copernicus programme Sentinel-2A and 2B satellite imagery maintained by the European Space Agency (ESA) were downloaded from the Copernicus Data Space Ecosystem hub. We have used the bottom-of-atmosphere (BOA) reflectance and terrain-surface-corrected (Level 2A) imagery related to three tile IDs (T34VFJ, T35VLD and T35VLC) by two S2 orbits, 36 and 79. We downloaded cloud-free (<10%) S2 time series imagery acquired from March to November 2023. Unfortunately, only eight cloud-free images covering at least 90% of the field plots were available: two from 1 and 22 April, two from 7 and 14 May, one from 8 June, one from 15 August, and finally, two from 11 and 21 September. Only S2 spectral bands with a spatial resolution of 10 m (2–4, 8) and 20 m (5–7, 8A, 11 and 12) were used for further research, Figure 2.
2.3. Methods
2.3.1. Dead Tree Separation by VI Thresholding on UAS-Based Imagery
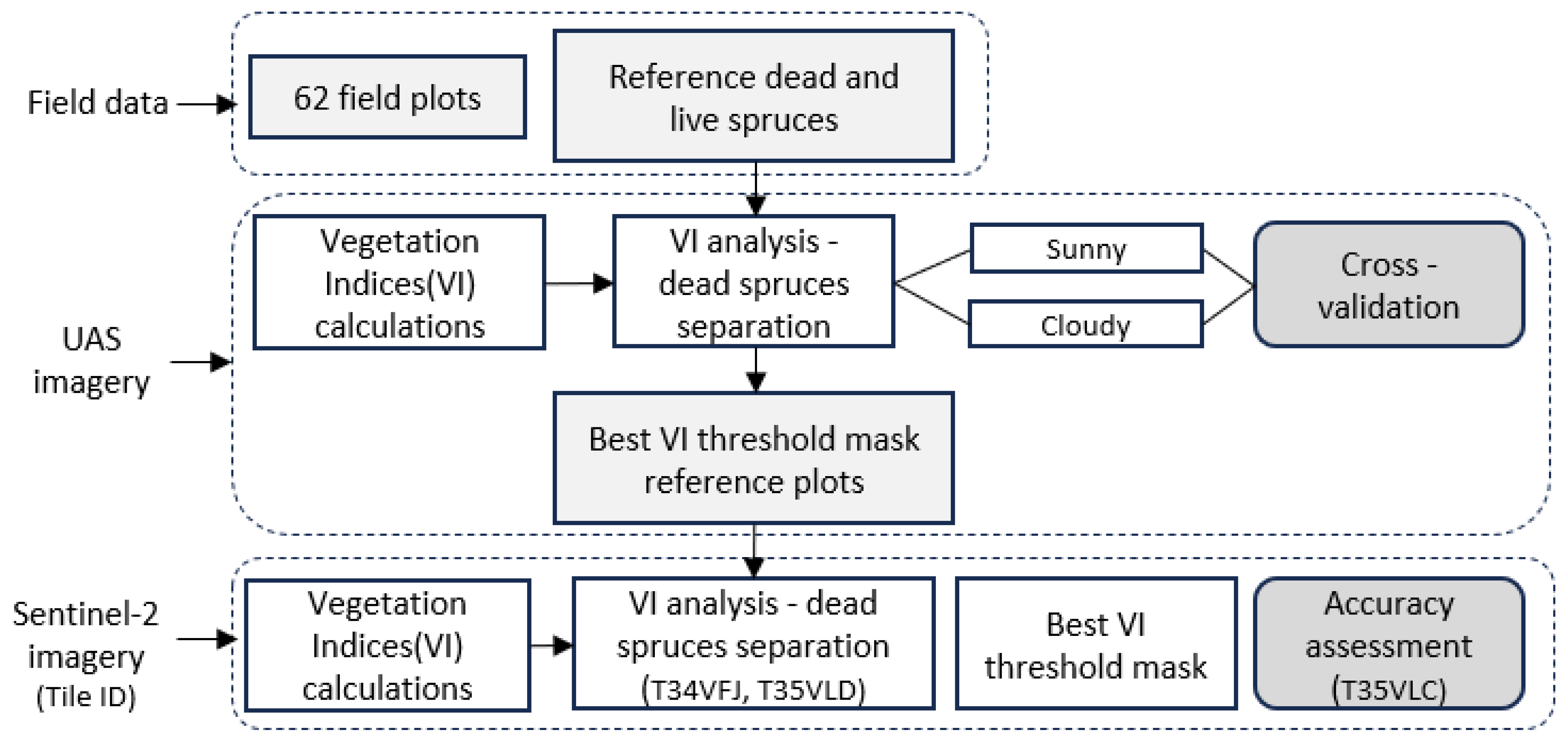
The given study focused on two scales related to spruce bark beetle deadwood separation by VI thresholding: tree-level by UAS-based imagery and landscape/stand-level by Sentinel-2 imagery, Figure 3. The acquired UAS-based MS orthophotos were used to calculate the VIs for detecting spruce trees caused by a bark beetle. Regarding UAS-based VIs, we mainly focused on the Red and NIR bands, which are sensitive to chlorophyll content concerning dead and live spruces and are most relevant in VI calculations. Based on previous research findings, the selection of VIs from Sentinel-2 was focused firstly on indices measuring chlorophyll, such as NDVI-based on Red and NIR bands, and secondly on indices measuring moisture content using SWIR bands. The selected VIs for the given research are presented in Table A1 based on equations from the online vegetation indices database Index-Data-Base (IDB) [38]. Soil indices were not selected because they are recommended primarily for open forest areas and require an accurate knowledge of the canopy background correction factor (L) if used in dense forests.
The descriptive statistics (reflections metrics) were collected from obtained VIs within a 0.4 m radius circle surrounding every field-identified dead or healthy spruce tree location. The spectra of each tree were calculated based on the mean value of all pixel reflections within the selected circle. The diameter of 0.8 m was chosen to collect only top-crown reflections from corresponding dead/healthy spruce and to avoid the shadowing effect. To select the most relevant VIs, the differences in the spectra of dead and healthy trees were analysed in terms of better separation (threshold) based on the minimal overlap of obtained histograms from dead and healthy trees across all field sample plots. Additionally, the effectiveness of the best VI predictor was compared in UAS flights carried out in cloudy conditions and under sunny weather conditions. The stratified three-fold cross-validation was performed to validate the most relevant VI, preserving the class ratio of 1035 dead and 305 healthy reference trees. In this connection, the first fold belonged to trees obtained under cloudy conditions, the second under mixed conditions, and the third fold during sunny weather. Finally, the spectral threshold of the most effective VI has been used to map (mask) standing dead spruce trees through all of the UAS-based orthophotos.
2.3.2. Effectiveness of Sentinel-2-Based VIs for Spruce Deadwood Cover Detection
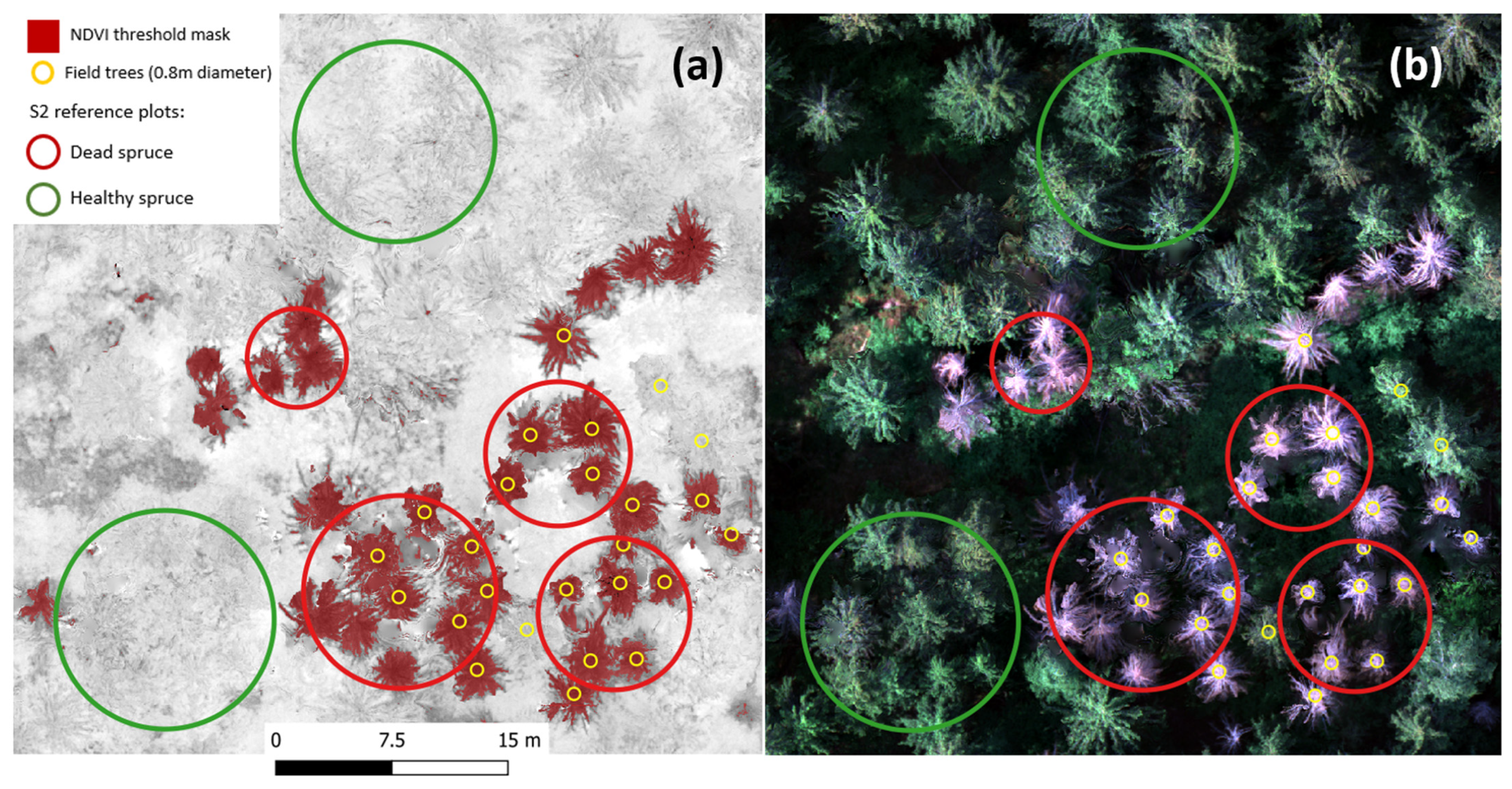
Based on the obtained UAS-based VI mask, the reference sample circular plots that included groups of dead and healthy spruces were manually created across all UAS imagery. Subsequently, these reference plots were used to compare and analyse the calculated Sentinel-2 indices, Figure 4. The effectiveness of calculated S2-based VIs in separating the dead and healthy canopy was evaluated based on the mean value of all pixel reflections within the selected circular plots, similar to UAS-based VIs. Due to differences in spatial resolutions (scales) between UAS (0.10 m GSD) and Sentinel-2, Table A2, every pixel of the S2 (10–20 m GSD) records mixed reflectance from the earth’s surface, combining information from the canopies and forest background (understorey, low vegetation, soil, etc.). Thus, the circular plots created are more relevant for VI analysis than the direct use of a UAS-based deadwood mask, which has mostly not included the forest background.
For the given study, two tiles of S2 imagery (T34VFJ and T35VLD) were used for model training, and the tile T35VLC was used for testing (validation), Figure 1. Thus, from a total of 346 manually created reference circular plots, 207 (set1: with 104 dead and 103 live spruce clusters) were utilised for VI testing, and 139 independent (set2: 69 dead and 70 live) plots were used for validation. The single-date Sentinel-2 image acquired on 8 June 2023, was selected for all computed VI comparisons and analyses. The main reason for this date being selected was that it was the same acquisition time as most UAS imagery. As new bark beetle infestations will start to impact trees’ colour changes in late summer, both UAS and Sentinel-2 VI analyses are related to deadwood detection that has occurred in the last two years. Early summertime in Latvia is characterised by fully blooming low vegetation and deciduous trees, which, based on previous research, should make it difficult for deadwood separation compared to early fall, thus adding challenges. Then, the most efficient vegetation index obtained was chosen for analysis based on the Sentinel-2 time series imagery.
The set3 of reference circular plots was created from some parts of sets 1–2, with additional new plots added across all Sentinel-2 tiles. The plot selection rule was based on isolating each cluster (groups) of dead trees so that each cluster was surrounded by a minimal buffer of 70–100 m of live trees. Finally, Set 3 consisted of 133 isolated dead tree plots (clusters) for spatial analysis related to finding the minimum dead tree cluster size, which can be sufficient for mapping using S2 imagery.
The VIs thresholding effectiveness (mask validation) and accuracy assessment for UAS and Sentinel-2 models were based on two-class (dead and live trees) classification metrics visualised by the confusion matrix. The following metrics were calculated: accuracy (ACC) (Equation (1)), true positive rate (TPR) or dead tree detection rate (Equation (2)), and true negative rate (TNR) or live (healthy) tree detection rate (Equation (3)) in comparison with corresponding reference plots [39].
TP (true positive) is the number of correctly detected dead trees, FN (false negative) is the number of dead trees which were classified as live trees, TN (true negative) is the number of correctly detected live trees, and FP (false positive) is a number of live trees which were classified as dead.
3. Results
3.1. Dead Spruce Separation by VI Thresholding Using UAS-Based Imagery
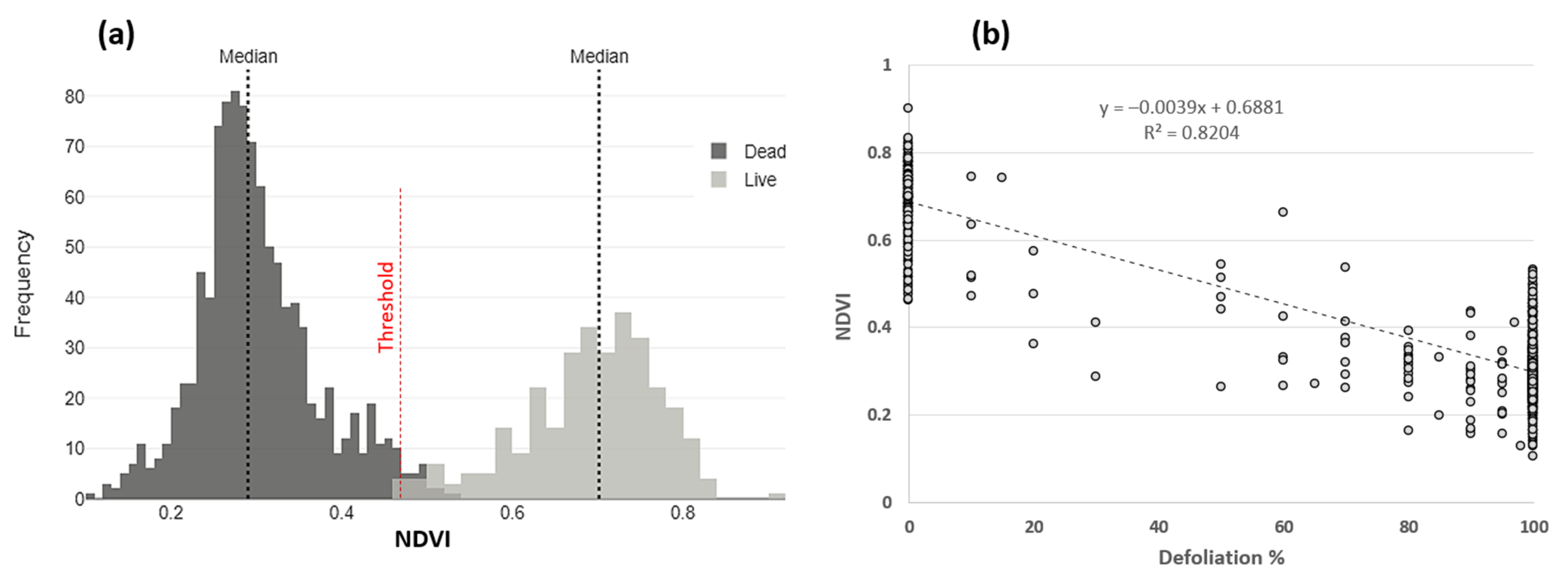
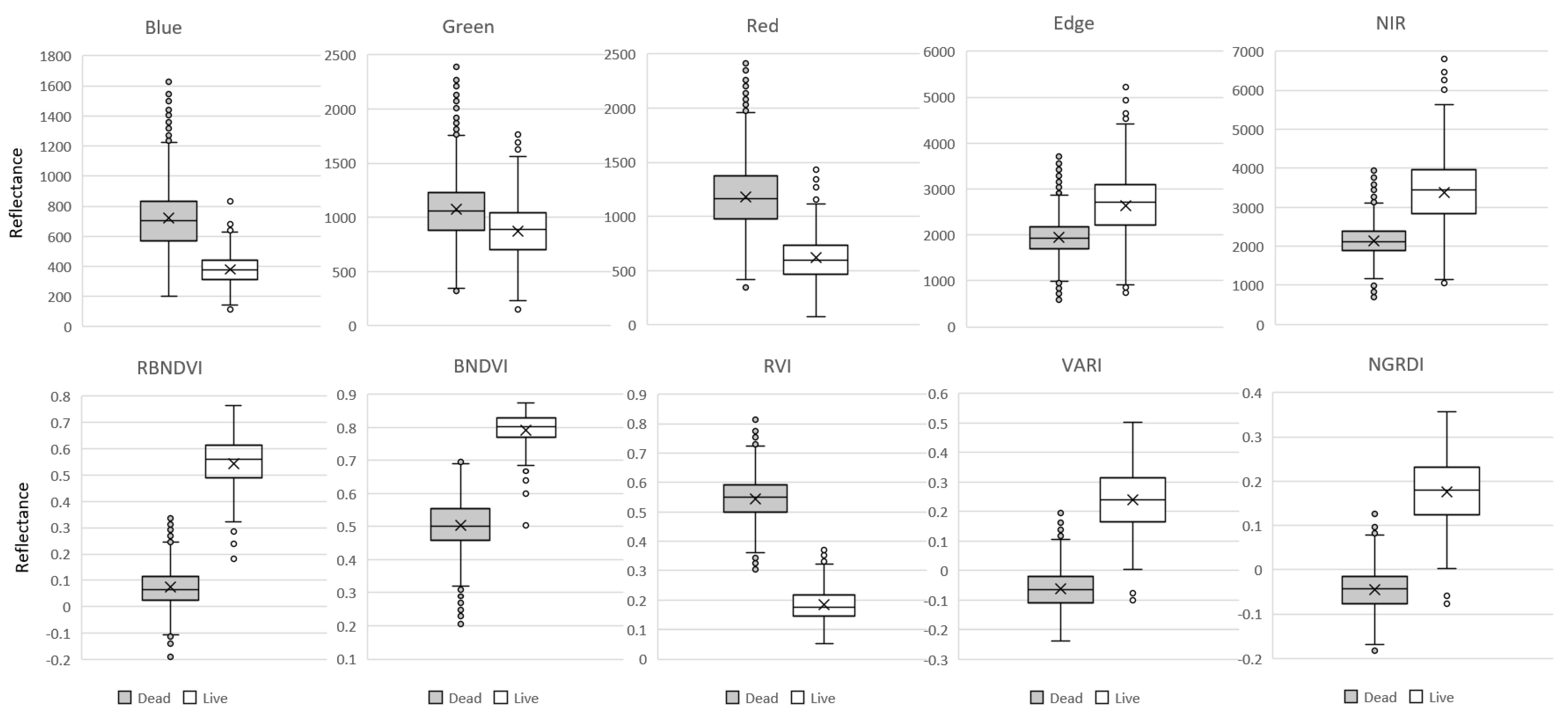
The NDVI and Red-Blue NDVI (RBNDVI) were the most sensitive vegetation indices for dead spruce separation from healthy trees after a spectral reflectance analysis of 1035 dead and 305 live spruces across the study area, shown in Figure 5 and Appendix A Figure A1. The Red band showed the best results among individual bands, thus confirming the performance of NDVI and RBNDVI. The results showed that VI thresholding based on the most common NDVI, retrieved from UAS imagery, effectively performs dead spruce detection.
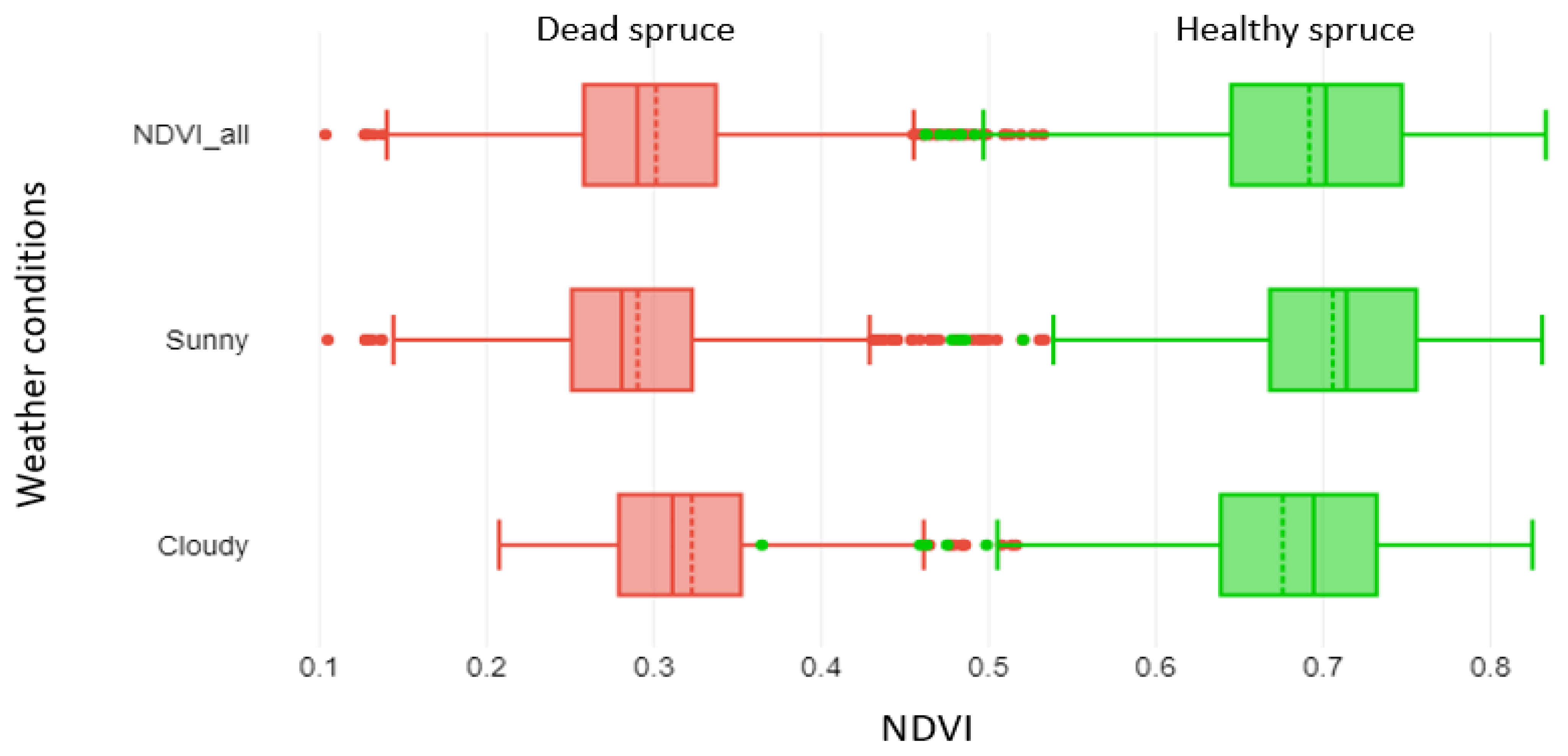
When comparing imagery taken under sunny and cloudy weather conditions, the NDVI demonstrated higher stability, as shown in Figure 6. However, the NDVI showed a slightly higher performance for dead spruce separation in sunny cases than cloudy ones; see Section 4.
The NDVI thresholding mask accuracy was validated using stratified three-fold cross-validation, preserving the class ratio of 1035 dead and 305 healthy reference spruces, Table 1. The cross-validation results confirmed the NDVI stability under different weather conditions during imagery acquisition with a slight advantage for sunny data. Thus, to create reference plots for evaluating Sentinel-2 calculated vegetation indices performance, we utilised the 0.46 NDVI threshold value for the deadwood mask creation, Figure 4.
3.2. Deadwood Separation by VI Thresholding Using Sentinel-2 Imagery
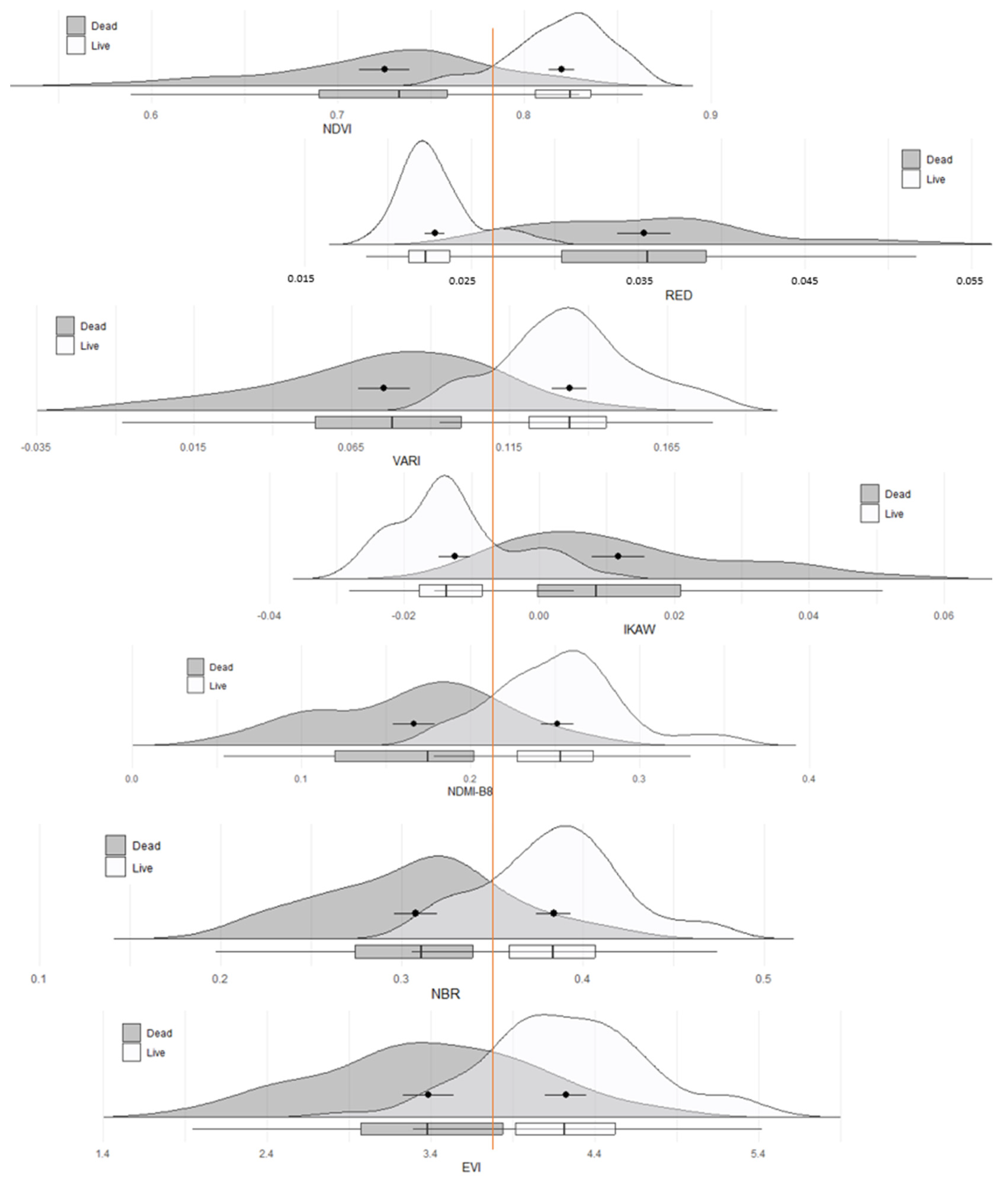
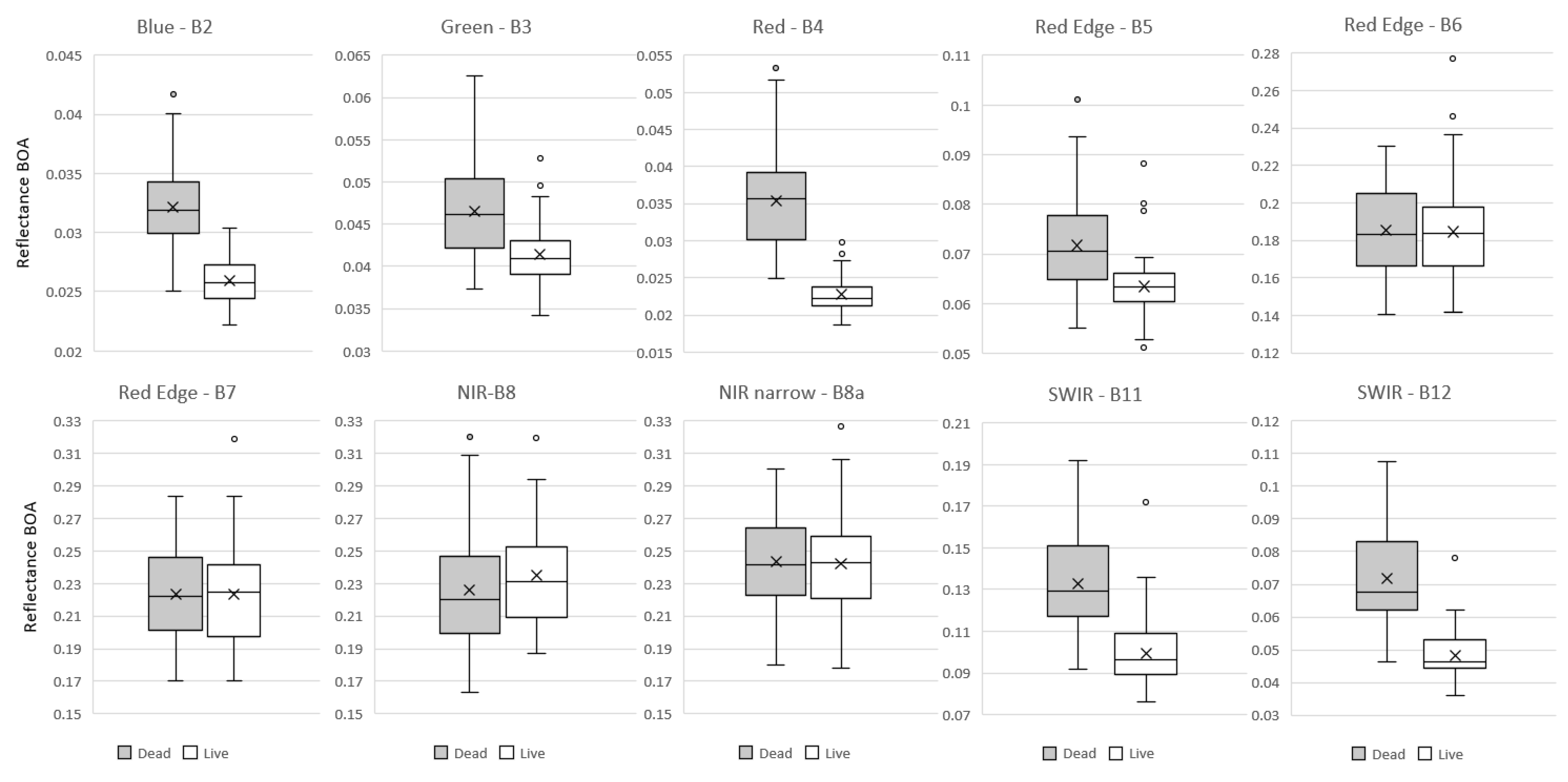
The study results showed that the effectiveness of using Sentinel-2-based vegetation indices for deadwood separation mainly depends on whether the index includes RED, BLUE, SWIR, and NIR individual bands, Appendix A Figure A2. Thus, the NDVI provided the best results using 207 (104 dead and 103 live) reference plots (Figure 4) across two Sentinel-2 tiles used for VI testing, Figure 7.
The indices that used visible light spectrum S2 bands, such as VARI (Visible Atmospherically Resistant Index) and IKaw (Kawashima Index), were second best after NDVI. Also, there was a high potential for spruce deadwood cover mapping shown by the NDMI (Normalised Difference Moisture Index) and NBR (Normalized Burned Ratio Index) using SWIR (Short-wave Infrared Imagery) bands (B11 and B12).
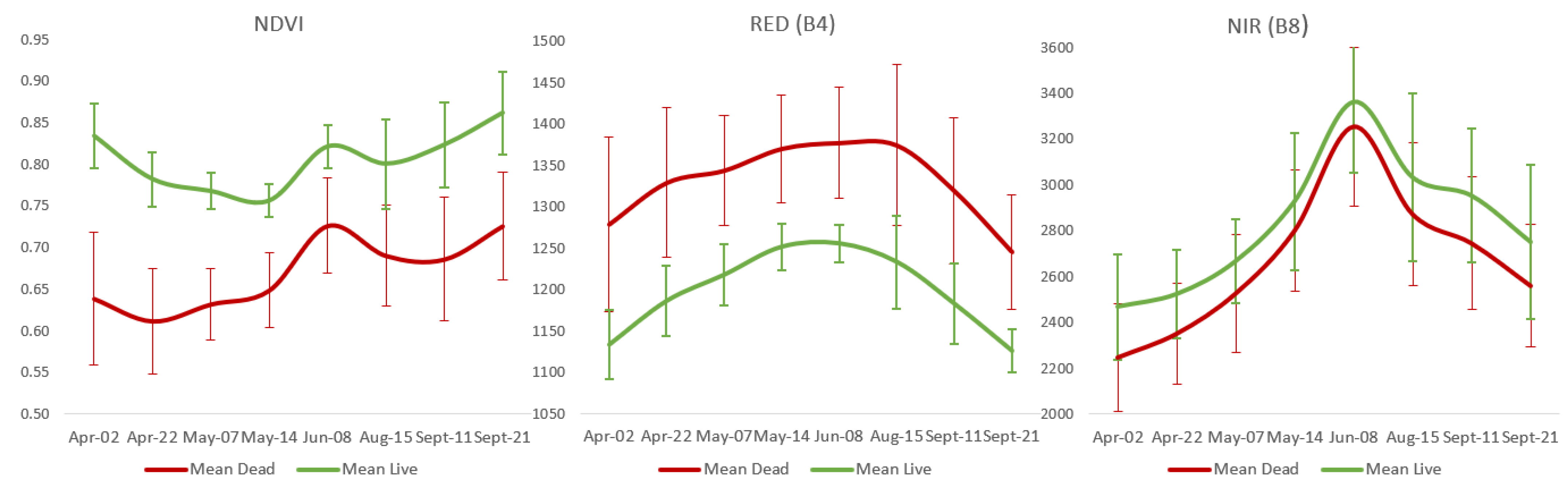
We compared the reflectance changes of NDVI and corresponding Red and NIR bands of available Sentinel-2 imagery acquired during the 2023 season, Figure 8. With increased reflectance at the middle of spring (April), summer (June), and end of September, the NDVI showed variable seasonality. The given variability was primarily attributed to the rapid growth of the NIR band reflectance (compared to Red) due to the beginning of flowering (canopy background) and the appearance of foliage (in mixed forests), as well as scene illumination changes due to increasing solar spectral irradiance (summer time).
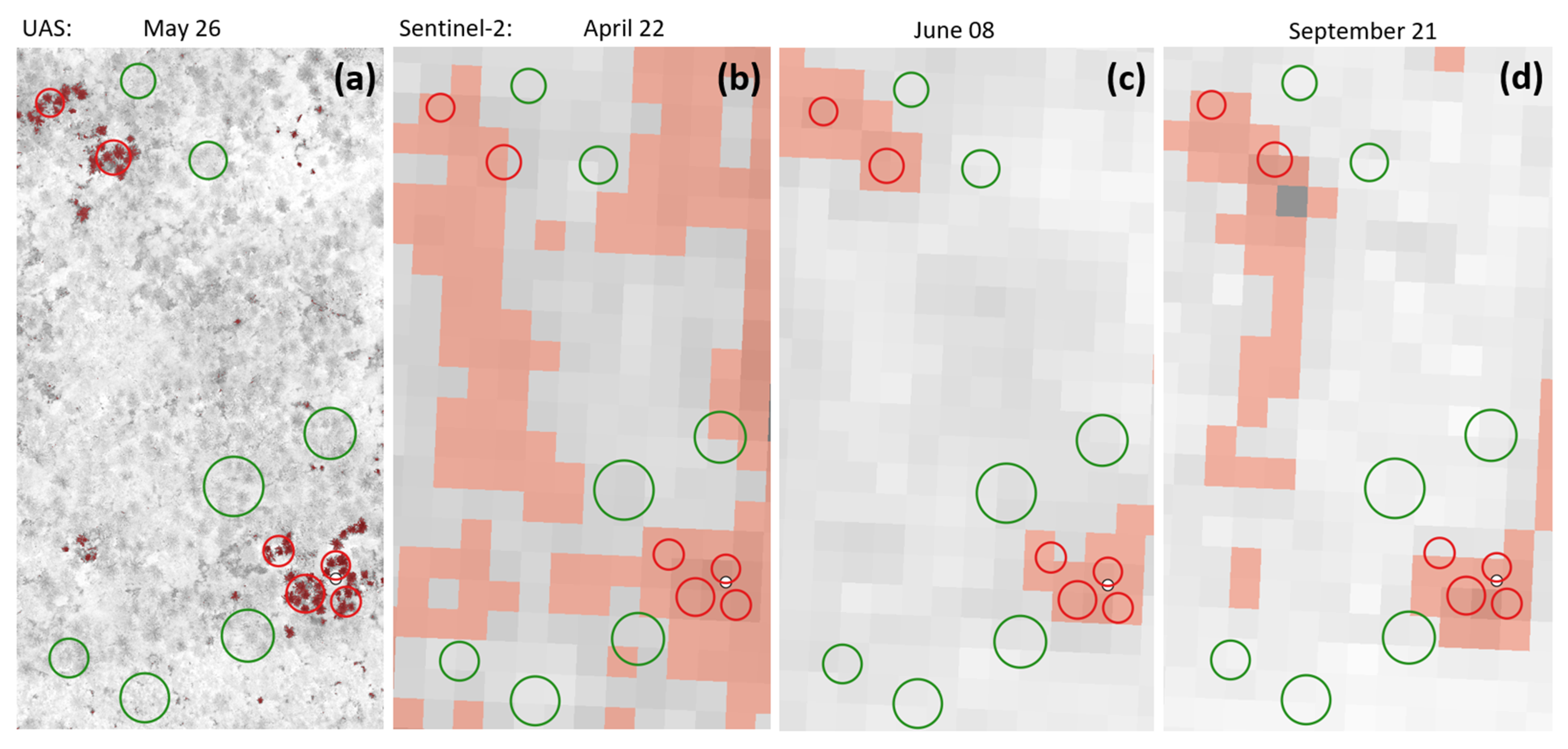
Based on NDVI variability during the season, three spruce deadwood cover binary masks (22 April (leaf-off), 8 June (leaf-on), and 21 September (leaf-on)) were calculated on the Sentinel-2 tile (T35VLC) used for the final validation. The following NDVI thresholds were used for binary mask calculations: on 22 April, mask values were 0.50–0.72 (as deadwood range); on 8 June, mask values were 0.55–0.77; and for the mask from 21 September, the values were 0.60–0.81. The calculated NDVI-based masks were updated and actualised based on available forest inventory (cut by forest inventory polygons with dominant spruce > 20%) and clear-cutting data. The confusion matrix results of the comparison of the Sentinel-2 NDVI-based deadwood mask and reference 139 (69 dead and 70 live) plots obtained from UAS imagery are presented in Table 2.
The validation results showed that the highest accuracy was achieved using the Sentinel-2 imagery acquired on 8 June, compared to late April and late September. Despite a decreased deadwood detection rate on 8 June, the number of correctly defined live spruces was noticeably higher than in April and September, thereby reducing the number of false positives (see Section 4).
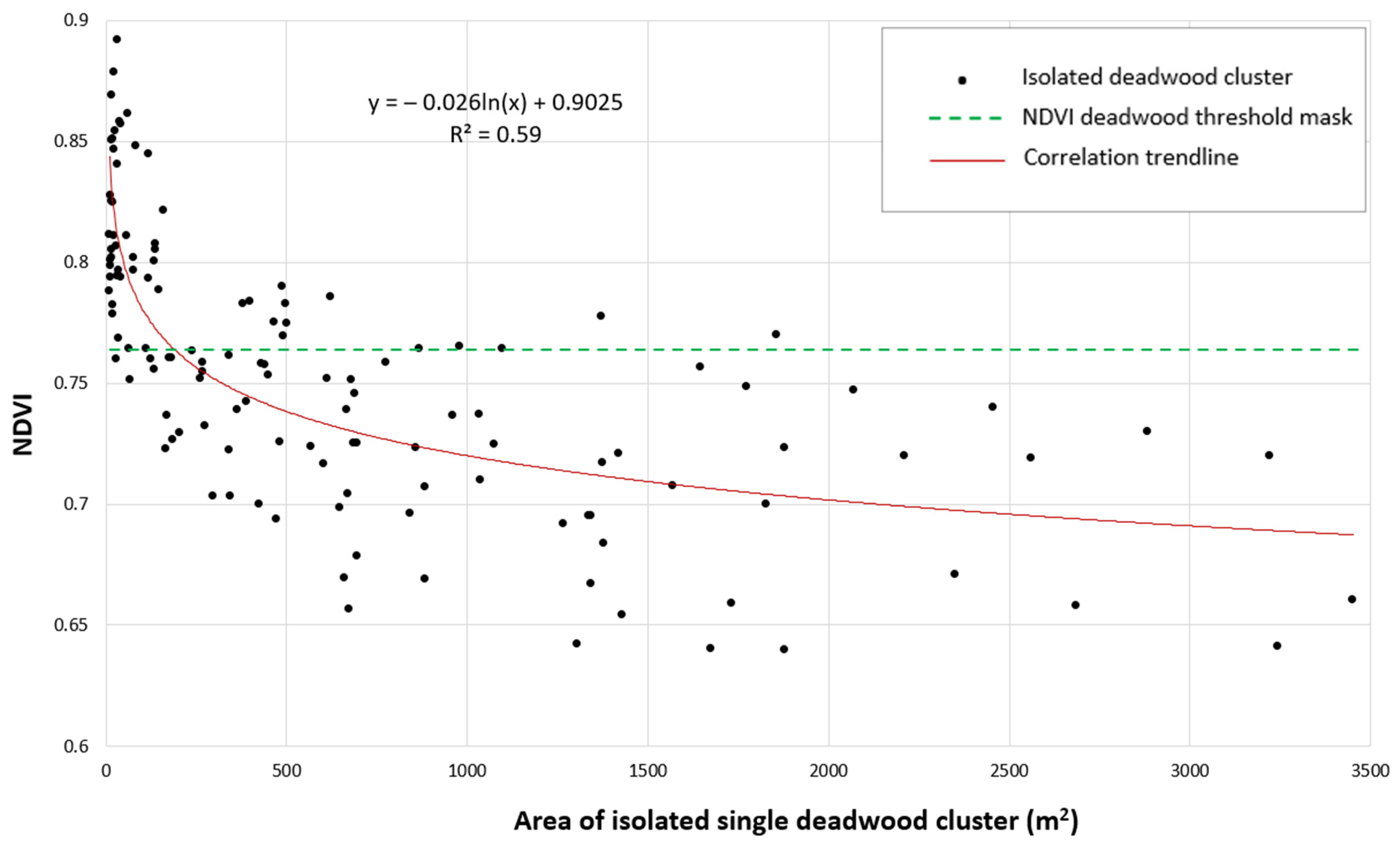
Without validation, we have performed a spatial analysis to determine the minimal isolated dead tree cluster size for sufficient deadwood separation by S2 imagery, Figure 9. Non-linear regression was conducted to examine the relationship between the calculated median NDVI (dependent variable) and the area of 133 isolated deadwood clusters (independent variable) using single-date S2 imagery from 8 June. Results show a moderate correlation between variables and indicate that the area of the isolated deadwood cluster explains more than 50% of the NDVI variance (R2 = 0.59, n = 133).
4. Discussion
4.1. Effectiveness of Dead Spruce Separation by UAS-Based VI Thresholding
Unsurprisingly, our research confirmed the efficiency of the VIs, including NDVI, RBNDVI, and RVI, for dead spruce separation. The Red band displayed higher reflectance in dead trees than live ones due to chlorophyll loss, whilst in contrast, the NIR displayed higher reflectance with living tree chlorophyll compared to dead trees, Figure A1, which is consistent with the findings of Lausch, et al. [40], Abdullah, et al. [41], and Junttila, et al. [42]. Our results showed that, thanks to normalisation, the NDVI minimises such factors as cloud and dominant tree shadows and illumination (irradiance) differences, remaining relatively stable over some time (e.g., UAS imagery acquired May–July for this study). In our research, NDVI was indifferent to highly sensitive forest background variations; however, it played a positive role in separating dead spruce. During the season of the UAS imagery acquisition (May–July), the Latvian hemi-boreal forest floor typically has no bare soil nor visible dead plant detritus, as it is already covered by ground cover such as flowering plants and grasses. As a result, the forest floor, the canopy background, has much brighter NDVI than dead spruce, Figure 4. Together, it was possible to separate dead spruce trees based on NDVI thresholding with an accuracy higher than 97% (Table 1) using high-resolution UAS multispectral imagery, consistent with previous studies. For instance, Heurich, et al. [43] achieved a dead spruce classification accuracy of 91.5% by object-orientated analysis applied to aerial photography. Hart and Veblen [44] achieved a cross-validation accuracy of 90% grey-stage spruce detection using support vector machine (SVM) classification applied to aerial imagery (1 m GSD). Using a UAS-based hyperspectral camera (0.1 m GSD), Näsi, et al. [45] obtained a 92% overall classification accuracy for two classes (healthy and dead) by SVM using VIs as features. Using convolutional neural network (CNN) segmentation, Sylvain, et al. [46] and Schiefer et al. [36] reported 0.95 and 0.85 dead tree detection F1-scores, respectively. Junttila et al. [42] obtained the highest classification accuracy for dead trees, 96–99%, using random forest (RF) models with UAS imagery.
The most interesting aspect of using NDVI is the slight variability of the index obtained under sunny and cloudy weather with some advantage for dead spruce separation under sunny conditions, Figure 6. This is explained by the fact that additional irradiance is almost fully reflected by dead spruce in the Red band but partly absorbed in NIR. A living tree proportionally absorbs and reflects additional energy in the Red and tries to maximise reflection in the NIR. As a result, NDVI reflectance obtained under sunny conditions slightly increases the gap between dead and live spruces (better separation) but with almost no impact on the NDVI threshold, Table 1. Thus, from a practical point of view, NDVI obtained under normal sunny or cloudy weather conditions can provide a sufficiently high separability of dead trees. Then, calculated deadwood masks can be prepared as landscape/stand-scale reference data for various satellite RS data (Sentinel-2, LandSAT-8, etc.) similar to previous studies by Kattenborn et al. [34] and Schiefer, et al. [36] and for very high-resolution satellite imagery (Pléiades 1A/1B and WorldView-2) presented by Abdollahnejad et al. [14].
4.2. Effectiveness of Dead Spruce Separation by Sentinel-2-Based VI Thresholding
This study showed that VIs based on Sentinel-2 Red (B4), BLUE (B2), and SWIR (B11, B12) bands have high effectiveness in deadwood spruce separation, Figure A2. Thus, the NDVI was the most reliable index, similar to the UAS case, followed by VARI and IKaw, which used only visible bands, concluding with indices that used SWIR bands, such as the Normalised Difference Moisture Index (NDMI) and Normalized Burned Ratio Index (NBR), Figure 7. By summarising the results of earlier studies related to spruce bark beetle damage detection by Sentinel-2 and Landsat imagery, it can be concluded that indices measuring moisture content by using SWIR bands performed better in the case of green and red attack detection, while indices measuring chlorophyll, such NDVI based on Red and NIR bands had advantages in grey-attack or deadwood separation. Huo, Persson and Lindberg [32] demonstrated that the Ratio Drought Index (RDI) and Normalised Difference Water Index (NDWI) using SWIR bands showed more prominent differences between healthy and stressed samples (green-attack). Candotti, et al. [47] found that the vegetation indices that used the Red-Edge (B06 and B07), SWIR (B12), and Red (B04) bands were more appropriate for effectively differentiating between healthy and stressed (red-attack) trees. Similar to this study, NDVI was the most reliable index in the Bryk, et al. [48] study, using a thresholding mask for deadwood, and might be helpful for spruce forest monitoring by Landsat8 imagery on a landscape scale. Similar conclusions and results concerning NDVI in spruce bark grey-attack detection have been achieved by Lastovicka, et al. [49] and Hart and Veblen [44] using Sentinel-2 and Landsat imagery. If the NIR band is unavailable from UAS or satellite sensors, visible band-based VIs, which consist of the Red (B4) band, like VARI, can replace the NDVI for spruce deadwood separation.
Regarding seasonality changes, the NIR and Red bands follow the period of leaf growth, increasing until the end of June and then decreasing until autumn, resulting in distinct NDVI seasonal variability, Figure 8. The lack of S2 imagery from July (due to clouds) did not allow us to check the influence of the maximum greenness period, which in Latvia continued between mid-June and the second half of August [50]. Since dead spruce appeared on the S2 imagery with complex (mixed) reflectance, including deadwood, live trees from different species, and canopy background (understorey, forest floor, soil, etc.), the reflectance could not be attributed entirely to deadwood and added uncertainty [51]. The classification validation illustrated better detection accuracy for both dead and live spruce in June compared to late April and late September, Table 2. Although the deadwood detection rate was lower in June, it had the lowest number of false positives (live wood marked as deadwood) leading to an increased overall accuracy. This gave an advantage to summer classification, Figure 10.
We assumed that some healthy trees changed their defoliation degree (e.g., 10% to 20%) during the period of research (April–September). However, we expected that most trees changed their status from green-to-red attack (requiring several months) but not from red-to-grey (requiring years). Based on previous research, e.g., [30,45], minor differences can be seen in the spectra of infested (green-to-red) and healthy trees, contrary to the significant difference between the reflectance spectra of the dead trees and the healthy canopy. Thus, the change in defoliation degree is more important for studies of early attack detection than for dead and healthy tree comparisons.
The overall very good accuracy (>80%) of the NDVI-based thresholding classification did not represent the ‘full view’ as it was based only on two classes (dead and live spruce). In reality, we expect worse results by including additional surrounding classes like trees from other species, gaps in the forest floor, etc. Therefore, the mid-April classification, with leaf-off deciduous trees, directly contributed to the increase in false positives (Figure 10b). In mid-April, the spectral differences between dead spruces and leaf-off deciduous trees were much less than in summertime when there is maximum greenness. This is also true for late autumn, when deciduous tree reflectance drops due to changes in chlorophyll and pigmentation.
Another critical aspect, associated with the spatial resolution of RS data, that directly impacts the efficiency of using spectral masks is the minimum size of the cluster of dead trees sufficient for mapping by S2 imagery. Based on this study’s results, the minimum size of the isolated deadwood should be at least 500–700 m2 or 5–7 pixels of S2 imagery for successful deadwood separation by NDVI, Figure 9. This means that the small groups (<500 m2) of dead spruce trees more likely cannot be detected by S2-based spectral masks. Unfortunately, previous studies have not addressed this issue, so we cannot compare our results directly. Therefore, the findings must be validated by future research. However, Zabihi et al. [28] adopted the rule from Woodcock and Strahler [52] for forests, stating that the spatial resolution should be ½–¾ the size of the object under research (e.g., an individual tree) and much higher when using mid-resolution satellite imagery with mixed pixel reflections like Landsat, S2, etc. For deadwood, Sentinel-2 mixed pixels can be detected if the corresponding pixel is at least surrounded by pixels with similar reflection, which gives a total of 5–7 pixels. Additionally, the use of NDVI could be beneficial in comparison with other VIs due to the use of only high-resolution (10 m) bands, consistent with the findings of Piltz [11].
4.3. Practical Recommendations and Limitations
This study successfully demonstrated the upscaling from individual dead spruce detection by UAS imagery, as reference data, to continuous deadwood mapping by VI thresholding at the stand/landscape level using medium-resolution Sentinel-2 imagery. The very high separability of dead spruces from UAS imagery minimised or completely excluded fieldwork, as dead trees can be easily recognised on orthophotos. The main disadvantage of using NDVI and other VIs is day and seasonal variability and sensitivity due to atmospheric influence, different sun-to-sensor and sensor-to-target geometry, irregularity and changes in forest species and the forest canopy background [48,53]. Therefore, the VIs-based threshold method is temporally unique and must be clarified and updated every time the deadwood cover mapping is performed. On the positive side, as clarifying and updating VI thresholds cannot be avoided, the requirement for atmospheric correction tools can be minimised or omitted. Also, less attention can be paid to imagery acquired in the same time period with different UAS platforms and sensors under various weather conditions (sunny or cloudy). More attention has to be paid to the quality and quantity of reference data obtained by UAS. Acquiring UAS-based imagery below clouds compared to Sentinel-2 data allows for more expensive, but continuous, forest monitoring and model development. At the same time, the availability of cloud-free Sentinel-2 imagery is crucial for successful use over large areas.
Another advantage of using NDVI is the ability of an inexperienced user to perform calculations, as the NDVI calculation tool is implemented in almost all GIS and geomatics programs. This study used only two (dead and live spruce) class-based VI classifications, which in mixed spruce forests leads to a high number of false positives. Undoubtedly, using classical ML, such as random forest and SVM classification algorithms with more parameters and classes, obtains higher accuracy, but needs more expertise. Nevertheless, understanding the spectral reflectance characteristics across all bands of UAS and S2 imagery related to dead spruce, provided in the given study, can increase the usability of the VIs in more advanced classification algorithms. The number of false positives in the case of VI thresholding can be minimised by using available forest inventory polygons, clear-cutting masks, or even LiDAR-based Digital Surface Models (DSM) with expand and shrink tools to filter false positives along roads, open fields, and large gaps in forests. This study found the summer (June–July) to be the most appropriate for spruce deadwood mapping by S2 imagery due to the higher reflectance of leaf-on deciduous trees rather than dead trees. The reader must remember that all provided results relate to hemiboreal spruce mix forests and may vary significantly across geographical and environmental conditions.
5. Conclusions
Due to unprecedented outbreaks of spruce-killing bark beetle activity, monitoring and mapping existing forest damage (grey attack) is an urgent need, along with detecting early-stage infestation. Our study demonstrated that the two-phase hierarchical integration of the high-resolution UAS imagery for dead tree detection used as training/reference data for mid-resolution satellite imagery (e.g., Sentinel-2) could be a fast and accurate procedure for deadwood cover mapping over large areas in dense, close-canopy mix conifer forests. The study showed that besides using modern machine learning (ML) and deep learning algorithms, the classical spectral vegetation index (VI) thresholding method provides a fast, simple, and accurate approach for dead tree/canopy detection. The findings of this study suggest that indices measuring chlorophyll based on Red and NIR bands have advantages in grey-attack or deadwood separation over indices measuring moisture content by using SWIR bands. Thus, the research determined the NDVI as the best and universal VI with high efficiency for bark beetle grey-attacked dead spruce separation from healthy trees by UAS and Sentinel-2 imagery. The study results showed that the NDVI minimises cloud and dominant tree shadows and differences in illumination, keeping NDVI relatively stable in sunny and cloudy conditions when using UAV imagery with a dead spruce detection accuracy of 97%.
The NDVI calculated from Sentinel-2 imagery during the summer leaf-on period (June–July) was most appropriate for spruce deadwood mapping with an accuracy of 85% and a deadwood detection rate of 83%. The study found that the spruce deadwood can be successfully classified by S2 imagery if the spatial extent of the isolated dead tree cluster allocates at least 5–7 Sentinel-2 pixels. Despite known shortcomings related to the use of NDVI and other VIs, like spectral seasonal variability, irregularity, and changes in forest species and canopy background, the VI thresholding approach could provide a quantitative and qualitative assessment of the affected forest structure and change detection that allows the elimination and prevention of the cumulative effects of the bark beetle invasion at a stand/landscape level.
Author Contributions
Conceptualization, G.G.; methodology, G.G.; validation, G.G.; formal analysis, G.G.; investigation, G.G. and E.M.U.; resources, E.M.U.; data curation, E.M.U.; writing—original draft preparation, G.G.; writing—review and editing, G.G. and E.M.U. All authors have read and agreed to the published version of the manuscript.
Funding
The financial support for this work was provided to the Institute of Electronics and Computer Science (Latvia) by the European Regional Development Fund (ERDF) within the project entitled “Remote sensing based system for forest risk factor monitoring (Forest Risk)” (No. 1.1.1.1/21/A/040).
Data Availability Statement
The data supporting this study’s findings are available from the corresponding author, G.G., upon reasonable request.
Acknowledgments
The Latvian Institute of Electronics and Computer Science (EDI) supported this work, and we are grateful to its staff for their assistance. We want to thank the Latvian State Forest Research Institute (LSFRI) ‘Silava’ team, which supported this work by providing UAS imagery and forest inventory data and, especially, to Jordane Jean-Claude Champion. The authors also thank Andrew Edwards for giving valuable comments and help.
Conflicts of Interest
The authors declare no conflicts of interest.
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
Vegetation indices (VIs) were calculated from UAS and Sentinel-2 imagery and used in the study from the Index-Data-Base (IDB) [38]. Sentinel-2 bands are shown in the brackets. The spectral and spatial characteristics of Sentinel-2 bands are at the bottom of the table.
Table A1.
Vegetation indices (VIs) were calculated from UAS and Sentinel-2 imagery and used in the study from the Index-Data-Base (IDB) [38]. Sentinel-2 bands are shown in the brackets. The spectral and spatial characteristics of Sentinel-2 bands are at the bottom of the table.
| Vegetation Index | Formula |
|---|---|
| NDVI—Normalised Difference Vegetation Index | |
| BNDVI—Blue-normalised difference VI | |
| RBNDVI—Red-Blue Normalised Difference VI | |
| RVI—Simple Ratio Vegetation Index | |
| VARI—Visible Atmospherically Resistant Index | |
| NGRDI—Normalised Difference Green/Red index | |
| IKAW—Kawashima Index | |
| NDMI—Normalised Difference Moisture Index | |
| NBR—Normalized Burned Ratio Index | |
| EVI—Enhanced Vegetation Index |
Table A2.
Sentinel-2 spectral bands (10–20 m GSD) used in this study.
| Band | Wavelength Range (nm) | Resolution (m) |
|---|---|---|
| Band 2—Blue | 458–523 | 10 |
| Band 3—Green | 543–578 | 10 |
| Band 4—Red | 650–680 | 10 |
| Band 5—Vegetation Red Edge | 698–713 | 20 |
| Band 6—Vegetation Red Edge | 734–748 | 20 |
| Band 7—Vegetation Red Edge | 765–785 | 20 |
| Band 8—NIR | 785–900 | 10 |
| Band 8A—Vegetation Red Edge | 855–875 | 20 |
| Band 11—SWIR | 1565–1655 | 20 |
| Band 12—SWIR | 2100–2280 | 20 |
Figure A1.
Boxplots displaying the spectral reflectance of reference 1035 dead (grey boxes) and 305 live spruces (white boxes) in individual DJIP4 bands (B-G-R-Edge-NIR) in raw DN values; and selected VIs, where RBNDVI—Red-Blue NDVI, BNDVI—NIR-Blue Normalised Difference VI, RVI—simple Ratio Vegetation Index, VARI—Visible Atmospherically Resistant Index and NGRDI—Normalised Difference Green/Red index.
Figure A1.
Boxplots displaying the spectral reflectance of reference 1035 dead (grey boxes) and 305 live spruces (white boxes) in individual DJIP4 bands (B-G-R-Edge-NIR) in raw DN values; and selected VIs, where RBNDVI—Red-Blue NDVI, BNDVI—NIR-Blue Normalised Difference VI, RVI—simple Ratio Vegetation Index, VARI—Visible Atmospherically Resistant Index and NGRDI—Normalised Difference Green/Red index.

Figure A2.
Boxplots displaying the mean spectral reflectance (BOA) of reference 207 (104 dead and 103 live) spruce circular plots in individual Sentinel-2 bands (10 m and 20 m GSD) of S2 imagery: S2B_MSIL2A_20230608T093549_N0509_R036_T34VFJ.
Figure A2.
Boxplots displaying the mean spectral reflectance (BOA) of reference 207 (104 dead and 103 live) spruce circular plots in individual Sentinel-2 bands (10 m and 20 m GSD) of S2 imagery: S2B_MSIL2A_20230608T093549_N0509_R036_T34VFJ.

References
- Hlásny, T.; König, L.; Krokene, P.; Lindner, M.; Montagné-Huck, C.; Müller, J.; Qin, H.; Raffa, K.F.; Schelhaas, M.-J.; Svoboda, M.; et al. Bark Beetle Outbreaks in Europe: State of Knowledge and Ways Forward for Management. Curr. For. Rep. 2021, 7, 138–165. [Google Scholar] [CrossRef]
- Senf, C.; Sebald, J.; Seidl, R. Increasing canopy mortality affects the future demographic structure of Europe’s forests. One Earth 2021, 4, 749–755. [Google Scholar] [CrossRef]
- Hlásny, T.; Krokene, P.; Liebhold, A.; Montagné-Huck, C.; Müller, J.; Qin, H.; Raffa, K.; Schelhaas, M.; Seidl, R.; Svoboda, M. Living with Bark Beetles: Impacts, Outlook and Management Options; European Forest Institute: Joensuu, Finland, 2019. [Google Scholar]
- Latvian Official Statistics Portal. Available online: https://stat.gov.lv/en/statistics-themes/business-sectors/forestry (accessed on 15 November 2023).
- Leišavnieks, E. The Most Disgusting Pest Is the Spruce Bark Beetle (in Latvian). Available online: https://www.la.lv/visnegantakais-kaitnieks-egles-astonzobu-mizgrauzis (accessed on 4 December 2023).
- Biedermann, P.H.W.; Müller, J.; Grégoire, J.-C.; Gruppe, A.; Hagge, J.; Hammerbacher, A.; Hofstetter, R.W.; Kandasamy, D.; Kolarik, M.; Kostovcik, M.; et al. Bark Beetle Population Dynamics in the Anthropocene: Challenges and Solutions. Trends Ecol. Evol. 2019, 34, 914–924. [Google Scholar] [CrossRef] [PubMed]
- Edburg, S.L.; Hicke, J.A.; Brooks, P.D.; Pendall, E.G.; Ewers, B.E.; Norton, U.; Gochis, D.; Gutmann, E.D.; Meddens, A.J. Cascading impacts of bark beetle-caused tree mortality on coupled biogeophysical and biogeochemical processes. Front. Ecol. Environ. 2012, 10, 416–424. [Google Scholar] [CrossRef] [PubMed]
- Huo, L.; Lindberg, E.; Bohlin, J.; Persson, H.J. Assessing the detectability of European spruce bark beetle green attack in multispectral drone images with high spatial- and temporal resolutions. Remote Sens. Environ. 2023, 287, 113484. [Google Scholar] [CrossRef]
- How to Prevent the Proliferation of Spruce Bark Beetles. Specialist Recommendations for Forest Owners. Available online: https://baltics.news/2023/01/31/how-to-prevent-the-proliferation-of-spruce-bark-beetles-specialist-recommendations-for-forest-owners/ (accessed on 2 November 2023).
- de Groot, M.; Diaci, J.; Kandare, K.; Krajnc, N.; Pisek, R.; Ščap, Š.; Stare, D.; Ogris, N. Private Forest Owner Characteristics Affect European Spruce Bark Beetle Management under an Extreme Weather Event and Host Tree Density. Forests 2021, 12, 346. [Google Scholar] [CrossRef]
- Piltz, K. Early-Stage Detection of Bark Beetle Infested Spruce Forest Stands Using Sentinel-2 Data and Vegetation Indices; Lund University: Lund, Sweden, 2022. [Google Scholar]
- Šmits, A. Meža Kaitēkļu Un Slimību Monitoringa 2022. Gada Rezultāti (in Latvian); Latvia’s State Forests: Riga, Latvia, 2023. [Google Scholar]
- JSC “Latvia’s State Forests”. Spruce Bark Beetle Control Measures (in Latvian). Available online: https://www.vmd.gov.lv/lv/jaunums/mizgrauza-ierobezosanas-pasakumi-vertejami-pozitivi (accessed on 2 November 2023).
- Abdollahnejad, A.; Panagiotidis, D.; Surový, P.; Modlinger, R. Investigating the Correlation between Multisource Remote Sensing Data for Predicting Potential Spread of Ips typographus L. Spots in Healthy Trees. Remote Sens. 2021, 13, 4953. [Google Scholar] [CrossRef]
- Meddens, A.J.H.; Hicke, J.A.; Vierling, L.A. Evaluating the potential of multispectral imagery to map multiple stages of tree mortality. Remote Sens. Environ. 2011, 115, 1632–1642. [Google Scholar] [CrossRef]
- Hall, R.J.; Castilla, G.; White, J.C.; Cooke, B.J.; Skakun, R.S. Remote sensing of forest pest damage: A review and lessons learned from a Canadian perspective. Can. Entomol. 2016, 148, S296–S356. [Google Scholar] [CrossRef]
- Lechner, A.M.; Foody, G.M.; Boyd, D.S. Applications in Remote Sensing to Forest Ecology and Management. One Earth 2020, 2, 405–412. [Google Scholar] [CrossRef]
- Marvasti-Zadeh, S.M.; Goodsman, D.; Ray, N.; Erbilgin, N. Early Detection of Bark Beetle Attack Using Remote Sensing and Machine Learning: A Review. ACM Comput. Surv. 2023, 56, 97. [Google Scholar] [CrossRef]
- Toth, C.; Jóźków, G. Remote sensing platforms and sensors: A survey. ISPRS J. Photogramm. Remote Sens. 2016, 115, 22–36. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; White, J.C.; Wulder, M.A.; Næsset, E. Remote sensing in forestry: Current challenges, considerations and directions. For. Int. J. For. Res. 2023, 97, 11–37. [Google Scholar] [CrossRef]
- Senf, C.; Seidl, R.; Hostert, P. Remote sensing of forest insect disturbances: Current state and future directions. Int. J. Appl. Earth Obs. Geoinf. 2017, 60, 49–60. [Google Scholar] [CrossRef] [PubMed]
- Otsu, K.; Pla, M.; Duane, A.; Cardil, A.; Brotons, L. Estimating the Threshold of Detection on Tree Crown Defoliation Using Vegetation Indices from UAS Multispectral Imagery. Drones 2019, 3, 80. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Xue, X.; Jiang, Y.; Shen, Q. Deep learning for remote sensing image classification: A survey. WIREs Data Min. Knowl. Discov. 2018, 8, e1264. [Google Scholar] [CrossRef]
- Koreň, M.; Jakuš, R.; Zápotocký, M.; Barka, I.; Holuša, J.; Ďuračiová, R.; Blaženec, M. Assessment of Machine Learning Algorithms for Modeling the Spatial Distribution of Bark Beetle Infestation. Forests 2021, 12, 395. [Google Scholar] [CrossRef]
- Kattenborn, T.; Leitloff, J.; Schiefer, F.; Hinz, S. Review on Convolutional Neural Networks (CNN) in vegetation remote sensing. ISPRS J. Photogramm. Remote Sens. 2021, 173, 24–49. [Google Scholar] [CrossRef]
- Turkulainen, E.; Honkavaara, E.; Näsi, R.; Oliveira, R.A.; Hakala, T.; Junttila, S.; Karila, K.; Koivumäki, N.; Pelto-Arvo, M.; Tuviala, J.; et al. Comparison of Deep Neural Networks in the Classification of Bark Beetle-Induced Spruce Damage Using UAS Images. Remote Sens. 2023, 15, 4928. [Google Scholar] [CrossRef]
- Zabihi, K.; Surovy, P.; Trubin, A.; Singh, V.V.; Jakuš, R. A review of major factors influencing the accuracy of mapping green-attack stage of bark beetle infestations using satellite imagery: Prospects to avoid data redundancy. Remote Sens. Appl. Soc. Environ. 2021, 24, 100638. [Google Scholar] [CrossRef]
- Commission, E.; Environment, D.-G.f.; Atzberger, C.; Zeug, G.; Defourny, P.; Aragão, L.; Hammarström, L.; Immitzer, M. Monitoring of Forests through Remote Sensing—Final Report; Publications Office: Luxembourg, 2020. [Google Scholar]
- Klouček, T.; Komárek, J.; Surový, P.; Hrach, K.; Janata, P.; Vašíček, B. The Use of UAV Mounted Sensors for Precise Detection of Bark Beetle Infestation. Remote Sens. 2019, 11, 1561. [Google Scholar] [CrossRef]
- Duarte, A.; Borralho, N.; Cabral, P.; Caetano, M. Recent Advances in Forest Insect Pests and Diseases Monitoring Using UAV-Based Data: A Systematic Review. Forests 2022, 13, 911. [Google Scholar] [CrossRef]
- Huo, L.; Persson, H.J.; Lindberg, E. Early detection of forest stress from European spruce bark beetle attack, and a new vegetation index: Normalized distance red & SWIR (NDRS). Remote Sens. Environ. 2021, 255, 112240. [Google Scholar] [CrossRef]
- Bárta, V.; Lukeš, P.; Homolová, L. Early detection of bark beetle infestation in Norway spruce forests of Central Europe using Sentinel-2. Int. J. Appl. Earth Obs. Geoinf. 2021, 100, 102335. [Google Scholar] [CrossRef]
- Kattenborn, T.; Lopatin, J.; Förster, M.; Braun, A.C.; Fassnacht, F.E. UAV data as alternative to field sampling to map woody invasive species based on combined Sentinel-1 and Sentinel-2 data. Remote Sens. Environ. 2019, 227, 61–73. [Google Scholar] [CrossRef]
- Alvarez-Vanhard, E.; Corpetti, T.; Houet, T. UAV & satellite synergies for optical remote sensing applications: A literature review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar] [CrossRef]
- Schiefer, F.; Schmidtlein, S.; Frick, A.; Frey, J.; Klinke, R.; Zielewska-Büttner, K.; Junttila, S.; Uhl, A.; Kattenborn, T. UAV-based reference data for the prediction of fractional cover of standing deadwood from Sentinel time series. ISPRS Open J. Photogramm. Remote Sens. 2023, 8, 100034. [Google Scholar] [CrossRef]
- Eichhorn, J.; Roskams, P.; Potocic, N.; Timmermann, V.; Ferretti, M.; Mues, V.; Szepesi, A.; Durrant, D.; Seletkovic, I.; Schroeck, H.-W. Part IV Visual assessment of crown condition and damaging agents. In Manual on Methods and Criteria for Harmonized Sampling, Assessment, Monitoring and Analysis of the Effects of Air Pollution on Forests; Thünen Institute of Forest Ecosystems: Eberswalde, Germany, 2016. [Google Scholar]
- University of Bonn, Institute of Crop Science and Resource Conservation (INRES), Index-Data-Base (IDB). Available online: https://www.indexdatabase.de/ (accessed on 1 November 2023).
- Tharwat, A. Classification assessment methods. Appl. Comput. Inform. 2021, 17, 168–192. [Google Scholar] [CrossRef]
- Lausch, A.; Heurich, M.; Gordalla, D.; Dobner, H.J.; Gwillym-Margianto, S.; Salbach, C. Forecasting potential bark beetle outbreaks based on spruce forest vitality using hyperspectral remote-sensing techniques at different scales. For. Ecol. Manag. 2013, 308, 76–89. [Google Scholar] [CrossRef]
- Abdullah, H.; Darvishzadeh, R.; Skidmore, A.K.; Groen, T.A.; Heurich, M. European spruce bark beetle (Ips typographus, L.) green attack affects foliar reflectance and biochemical properties. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 199–209. [Google Scholar] [CrossRef]
- Junttila, S.; Näsi, R.; Koivumäki, N.; Imangholiloo, M.; Saarinen, N.; Raisio, J.; Holopainen, M.; Hyyppä, H.; Hyyppä, J.; Lyytikäinen-Saarenmaa, P.; et al. Multispectral Imagery Provides Benefits for Mapping Spruce Tree Decline Due to Bark Beetle Infestation When Acquired Late in the Season. Remote Sens. 2022, 14, 909. [Google Scholar] [CrossRef]
- Heurich, M.; Ochs, T.; Andresen, T.; Schneider, T. Object-orientated image analysis for the semi-automatic detection of dead trees following a spruce bark beetle (Ips typographus) outbreak. Eur. J. For. Res. 2010, 129, 313–324. [Google Scholar] [CrossRef]
- Hart, S.J.; Veblen, T.T. Detection of spruce beetle-induced tree mortality using high- and medium-resolution remotely sensed imagery. Remote Sens. Environ. 2015, 168, 134–145. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Blomqvist, M.; Lyytikäinen-Saarenmaa, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Holopainen, M. Remote sensing of bark beetle damage in urban forests at individual tree level using a novel hyperspectral camera from UAV and aircraft. Urban For. Urban Green. 2018, 30, 72–83. [Google Scholar] [CrossRef]
- Sylvain, J.-D.; Drolet, G.; Brown, N. Mapping dead forest cover using a deep convolutional neural network and digital aerial photography. ISPRS J. Photogramm. Remote Sens. 2019, 156, 14–26. [Google Scholar] [CrossRef]
- Candotti, A.; De Giglio, M.; Dubbini, M.; Tomelleri, E. A Sentinel-2 Based Multi-Temporal Monitoring Framework for Wind and Bark Beetle Detection and Damage Mapping. Remote Sens. 2022, 14, 6105. [Google Scholar] [CrossRef]
- Bryk, M.; Kołodziej, B.; Pliszka, R. Changes of Norway Spruce Health in the Białowieża Forest (CE Europe) in 2013–2019 during a Bark Beetle Infestation, Studied with Landsat Imagery. Forests 2021, 12, 34. [Google Scholar] [CrossRef]
- Lastovicka, J.; Svec, P.; Paluba, D.; Kobliuk, N.; Svoboda, J.; Hladky, R.; Stych, P. Sentinel-2 Data in an Evaluation of the Impact of the Disturbances on Forest Vegetation. Remote Sens. 2020, 12, 1914. [Google Scholar] [CrossRef]
- Klimavičius, L.; Rimkus, E.; Stonevičius, E.; Mačiulytė, V. Seasonality and long-term trends of NDVI values in different land use types in the eastern part of the Baltic Sea basin. Oceanologia 2023, 65, 171–181. [Google Scholar] [CrossRef]
- Rautiainen, M.; Lukeš, P. Spectral contribution of understory to forest reflectance in a boreal site: An analysis of EO-1 Hyperion data. Remote Sens. Environ. 2015, 171, 98–104. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Strahler, A.H. The factor of scale in remote sensing. Remote Sens. Environ. 1987, 21, 311–332. [Google Scholar] [CrossRef]
- Rautiainen, M.; Lukeš, P.; Homolová, L.; Hovi, A.; Pisek, J.; Mõttus, M. Spectral Properties of Coniferous Forests: A Review of In Situ and Laboratory Measurements. Remote Sens. 2018, 10, 207. [Google Scholar] [CrossRef]
Figure 1.
The central part of Latvia represented the study area, with locations of forest inventory sample plots and UAS imagery taken in March–July 2023, covered by the Sentinel-2 tiles used in this study. Two photos represent spruce clusters with 0% (a) and 100% (b) defoliation degree.
Figure 1.
The central part of Latvia represented the study area, with locations of forest inventory sample plots and UAS imagery taken in March–July 2023, covered by the Sentinel-2 tiles used in this study. Two photos represent spruce clusters with 0% (a) and 100% (b) defoliation degree.

Figure 2.
Timeline acquisition of datasets used in this study. S2—Sentinel-2 cloud-free imagery acquisition dates were chosen for the given research.
Figure 2.
Timeline acquisition of datasets used in this study. S2—Sentinel-2 cloud-free imagery acquisition dates were chosen for the given research.

Figure 3.
Overview of the study workflow.

Figure 4.
The manually created reference plots of dead (red circles) and healthy (green) spruces by using an (a) NDVI-based threshold mask (red polygons) and (b) visualised on corresponding RGB orthophoto.
Figure 4.
The manually created reference plots of dead (red circles) and healthy (green) spruces by using an (a) NDVI-based threshold mask (red polygons) and (b) visualised on corresponding RGB orthophoto.

Figure 5.
NDVI—best VI predictor for separation of dead (90–100% defoliation) and live (healthy) spruces (0–10% defoliation) in the study area, where (a) presents histograms with NDVI threshold of 0.46 for dead tree separation and (b) presents corresponding NDVI and tree defoliation correlation graph.
Figure 5.
NDVI—best VI predictor for separation of dead (90–100% defoliation) and live (healthy) spruces (0–10% defoliation) in the study area, where (a) presents histograms with NDVI threshold of 0.46 for dead tree separation and (b) presents corresponding NDVI and tree defoliation correlation graph.

Figure 6.
Boxplots illustrate the efficiency of separating dead spruce by NDVI based on weather conditions during UAS imagery acquisition, where NDVI_all includes all cases under sun and cloudy conditions (second and third graphs, respectively).
Figure 6.
Boxplots illustrate the efficiency of separating dead spruce by NDVI based on weather conditions during UAS imagery acquisition, where NDVI_all includes all cases under sun and cloudy conditions (second and third graphs, respectively).

Figure 7.
Raincloud plots of the six best vegetation indices and Red band calculated from single-date Sentinel-2 imagery (8 June) compared to 207 (104 dead and 103 live) reference plots of dead and live spruces. Redline—possible VI threshold for deadwood cover.
Figure 7.
Raincloud plots of the six best vegetation indices and Red band calculated from single-date Sentinel-2 imagery (8 June) compared to 207 (104 dead and 103 live) reference plots of dead and live spruces. Redline—possible VI threshold for deadwood cover.

Figure 8.
The changes in mean reflectances with standard deviations of Sentinel-2 NDVI, RED, and NIR bands associated with dead and live spruce plots across the 2023 season.
Figure 8.
The changes in mean reflectances with standard deviations of Sentinel-2 NDVI, RED, and NIR bands associated with dead and live spruce plots across the 2023 season.

Figure 9.
Non-linear correlation graph of calculated median NDVI (dependent variable) and area of 133 isolated deadwood clusters (independent variable) using single-date S2 imagery (8 June).
Figure 9.
Non-linear correlation graph of calculated median NDVI (dependent variable) and area of 133 isolated deadwood clusters (independent variable) using single-date S2 imagery (8 June).

Figure 10.
Deadwood classification results using S2 NDVI threshold binary masks (red polygons) over NDVI images, where (a) is the UAS NDVI (0.1 m GSD) used for creating reference circle plots of dead (red circles) and healthy (green circles) spruce and (b) is the S2-based NDVI from 22 April, (c) from 8 June, and (d) from 21 September. The NDVI represent the mixed spruce forest subset 120 × 220 m.
Figure 10.
Deadwood classification results using S2 NDVI threshold binary masks (red polygons) over NDVI images, where (a) is the UAS NDVI (0.1 m GSD) used for creating reference circle plots of dead (red circles) and healthy (green circles) spruce and (b) is the S2-based NDVI from 22 April, (c) from 8 June, and (d) from 21 September. The NDVI represent the mixed spruce forest subset 120 × 220 m.

Table 1.
Summary of the stratified three-fold cross-validation of NDVI effectiveness based on confusion matrix results, where ACC—accuracy (Equation (1)), TPR—dead tree detection rate (Equation (2)), and TNR—healthy tree detection rate (Equation (3)).
Table 1.
Summary of the stratified three-fold cross-validation of NDVI effectiveness based on confusion matrix results, where ACC—accuracy (Equation (1)), TPR—dead tree detection rate (Equation (2)), and TNR—healthy tree detection rate (Equation (3)).
| Training Folds | Test Fold | NDVI Thr. | Weather Conditions | Classification Metrics | |||
|---|---|---|---|---|---|---|---|
| (Trees) | (Trees) | Training Set | Test Set | (ACC) | TPR (Dead Trees) | TNR (Live Trees) | |
| 1–2 (893) | 3 (447) | 0.48 | Mostly cloudy | Sunny | 0.99 | 0.99 | 0.98 |
| 2–3 (893) | 1 (447) | 0.47 | Mostly sunny | Clouds | 0.98 | 0.98 | 0.97 |
| 1–3 (894) | 2 (446) | 0.46 | Mix | Mix | 0.97 | 0.97 | 0.97 |
Table 2.
The Sentinel-2-based spruce deadwood threshold masks validation results. The confusion matrices of S2 NDVI-based deadwood binary masks compared with UAS-based 139 reference plots of dead and live (healthy) spruces. ACC—accuracy (Equation (1)), TPR—true positive rate (Equation (2)) and TNR—true negative rate (Equation (3)).
Table 2.
The Sentinel-2-based spruce deadwood threshold masks validation results. The confusion matrices of S2 NDVI-based deadwood binary masks compared with UAS-based 139 reference plots of dead and live (healthy) spruces. ACC—accuracy (Equation (1)), TPR—true positive rate (Equation (2)) and TNR—true negative rate (Equation (3)).
| S2 Date (Threshold Mask) | Predicted | Classification Metrics | |||||
|---|---|---|---|---|---|---|---|
| Dead | Live | ||||||
| 22 April (0.52–0.72) | 79 | 60 | Accuracy (ACC) | 0.80 | |||
| Actual | Dead | 69 | 60 | 9 | Deadwood detection rate (TPR) | 0.87 | |
| Live | 70 | 19 | 51 | Live spruce detection rate (TNR) | 0.73 | ||
| Dead | Live | ||||||
| 08 June (0.57–0.77) | 66 | 73 | Accuracy (ACC) | 0.85 | |||
| Actual | Dead | 69 | 57 | 12 | Deadwood detection rate (TPR) | 0.83 | |
| Live | 70 | 9 | 61 | Live spruce detection rate (TNR) | 0.87 | ||
| Dead | Live | ||||||
| 21 September (0.60–0.81) | 79 | 60 | Accuracy (ACC) | 0.81 | |||
| Actual | Dead | 69 | 61 | 8 | Deadwood detection rate (TPR) | 0.88 | |
| Live | 70 | 18 | 52 | Live spruce detection rate (TNR) | 0.74 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Goldbergs, G.; Upenieks, E.M. Hierarchical Integration of UAS and Sentinel-2 Imagery for Spruce Bark Beetle Grey-Attack Detection by Vegetation Index Thresholding Approach. Forests 2024, 15, 644. https://doi.org/10.3390/f15040644
AMA Style
Goldbergs G, Upenieks EM. Hierarchical Integration of UAS and Sentinel-2 Imagery for Spruce Bark Beetle Grey-Attack Detection by Vegetation Index Thresholding Approach. Forests. 2024; 15(4):644. https://doi.org/10.3390/f15040644
Chicago/Turabian StyleGoldbergs, Grigorijs, and Emīls Mārtiņš Upenieks. 2024. "Hierarchical Integration of UAS and Sentinel-2 Imagery for Spruce Bark Beetle Grey-Attack Detection by Vegetation Index Thresholding Approach" Forests 15, no. 4: 644. https://doi.org/10.3390/f15040644
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.